Your new post is loading...
Your new post is loading...
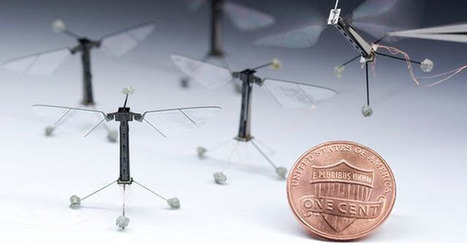
Des ailes remplacent les hélices, renforçant la ressemblance avec les insectes volants. Des chercheurs de l’Université d’Harvard, du MIT et de la City University of Hong Kong sont parvenus à réduire la taille des drones, tout en conservant une bonne résistance aux chocs et aux rafales de vent. C’est en s’inspirant de la nature et plus particulièrement des insectes qu’ils sont parvenus à réduire de manière drastique l’envergure des drones.
Par Alain Fraval. OPIE-Insectes. Les Épingles entomologiques - En épingle en 2020 : Juillet
"Pas élégante ni discrète mais petite, légère, sobre, communicante, orientable… elle vient d'être mise au point à l'université de Washington (États-Unis) et fonctionne en relation avec un smartphone et grâce à la collaboration gracieuse d'Elodes sp. et d'Absolus verrucosus, venus spécialement du désert de Sonora.
Ces deux Coléoptères Ténébrionidés, connus des locaux comme le Scarabée de Pinacate et le Scarabée fait-le-mort, sont reconnus comme des coléos costauds. Ils ont accepté de se faire coller sur le dos du corselet une carte électronique hérissée de composants, dont une pile – l'ensemble pesant un quart de gramme -, et de se promener avec, sur les graviers, dans l'herbe et même de grimper aux arbres, librement*. On leur a assuré qu'ils vivraient encore plus d'un an après l'expérience.
Le dispositif comporte une caméra qui envoie, par radio (Bluetooth), de 1 à 5 vues noir et blanc de 160 x 120 pixels par seconde ; elle est montée sur un support orientable de 60° – par chauffage de la lame en alliage à mémoire de forme qui la porte – ce qui compense son très faible champ pour une dépense minime en énergie. Pour raison d'économie aussi, un accéléromètre coupe la prise de vue quand la bête porteuse n'avance pas. Ainsi la pile peut durer jusqu'à 6 heures.
L'équipe de roboticiens a déjà conçu un concurrent artificiel : un engin mécanique pas plus gros que les ténébrions, autonome, communicant, qui chemine en vibrant et s'arrête à chaque prise de vue pour ne pas flouter l'image.
Cette invention, destinée à l'exploration des lieux inaccessibles et à faire avancer les sciences des insectes et des robots, n'est pas sans risques pour le respect de la vie privée."
D'après notamment « A GoPro for beetles: Researchers create a robotic camera backpack for insects », par Sarah McQuate . Lu le 15 juillet 2020 à
www.washington.edu/
Photo : Elodes sp. équipé. Cliché Mark Stone
* Ces insectes ne sont pas des Zombiptères.
Portail pour la Science de l'Ambassade de France en Allemagne. « Un projet entre l’Université libre de Berlin et le Centre Bernstein permet le développement d’un robot capable de percevoir des stimuli extérieurs et de répondre à ces influx. »
[...]
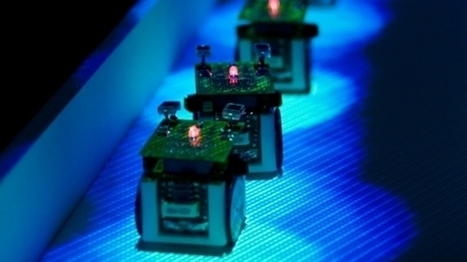
« Au cours d’une expérience, les scientifiques ont placé le robot au milieu d’une pièce dont les murs comportaient des taches rouges et bleues. Lorsque le robot scannait une couleur avec la caméra, un signal lumineux était déclenché par les scientifiques. Ce signal assurait une fonction de mémorisation par le robot en activant le réseau de neurones artificiels. Puis, le traitement de l’information permettait le contrôle des roues du robot, lequel avançait lorsqu’il observait la couleur rouge et reculait avec la couleur bleu. « Le robot est ainsi capable d’identifier un objet de couleur, puis de relier cette couleur à l’action désirée en quelques secondes » a déclaré Nawrot. Les chercheurs envisagent désormais d’ajouter d’autres formes d’apprentissage à ce réseau neuronal artificiel. »
[Image] Capture vidéo YouTube - Conditioned behavior in a robot controlled by a spiking neural network
L’équipe dirigée par le Dr. Rober Wood a réussi à recréer des similitudes avec le vol d’une vraie mouche. Le temps au démarrage est infime grâce à l’utilisation de matériaux piézoélectriques. L’objectif principal de leurs travaux était de comprendre les mécanismes de vol des insectes. Maintenant que le robot est prêt, ils pensent déjà à une future version sans fil.
Une société fabricant des animatroniques pour les tournages de films, vient de dévoiler un robot hexapode impressionnant comportant une cabine de pilotage pouvant accueillir un humain. L’appareil se déplace lentement mais sûrement, mais ça peut se comprendre… Il pèse quasiment deux tonnes !
Des chercheurs de l'Université de Tokyo ont cherché à étudier le comportement d'un insecte auquel on laisse les commandes d'un robot assez basique. Les résultats sont surprenants. Le bombyx du mûrier est plus connu pour sa chenille, le ver à soie, que pour ses facultés à piloter un engin robotisé. Et pourtant, le mâle étudié est parvenu à contrôler un robot afin de se diriger vers un espace chargé en phéromones d'une femelle de son espèce. ...
→ Scientists let a moth drive a robot, study its tracking behavior http://www.engadget.com/2013/02/06/moth-drives-robot/
|
Une révolution s’avère nécessaire pour relever tous les défis de l'intelligence artificielle et les insectes seront au cœur des innovations. Par Elina S. 18 février 2021 "... Observer et apprendre de la nature pourraient améliorer l’IA. Prenez les abeilles, par exemple. Ces petites créatures sont extraordinairement douées pour naviguer dans leur environnement. Elles peuvent réagir à de nouvelles situations et adaptent leurs comportements au gré des changements. Ces insectes réussissent cet exploit avec seulement un million de neurones dans leur minuscule cerveau. En comparaison, les IA à apprentissage profond peuvent nécessiter des centaines de milliers, voire des millions de neurones pour effectuer une seule tâche. Avec les insectes, la possibilité de recréer leur cerveau à l’aide de logiciels n’est pas loin. Des chercheurs ont travaillé sur la réplication du cerveau des abeilles en silicium. Imitation des abeilles et développement de l’IA Jusqu’à présent, les chercheurs ont procédé à la rétro-ingénierie d’une partie du système visuel, des centres de navigation et de mémoire. Cela a permis de créer un drone entièrement autonome en laboratoire avec une puce intégrée qui le dirige pour éviter les obstacles en vol. Les algorithmes rétroconçus sont extrêmement efficaces. Ils utilisent environ 1% de la puissance informatique de l’apprentissage profond, tout en s’exécutant plus de 100 fois plus vite. Ils sont également beaucoup plus robustes pour faire face à des situations inconnues, comme le ferait le cerveau des abeilles. Les prochaines étapes de cette approche consistent à déployer davantage de capacités du cerveau d’abeille sur le silicium et à sortir les drones du laboratoire. La prochaine vague de progrès de l’IA pourrait bien être à portée de main." ____________________________________________ [Image] Crédit : Michelle D’urbano
"Malgré plus de 50 ans de recherche en robotique, la plupart des robots existants sont loin d’être aussi résilients que les animaux : ce sont des machines fragiles qui stoppent facilement de fonctionner lorsque les conditions deviennent difficiles. Le but du projet est de changer cette situation en proposant de nouveaux algorithmes permettant à des robots autonomes de continuer leurs missions dans des situations complètement imprévues, et notamment des dommages matériels." RECHERCHE / Actualités / Les ERC à l'UPMC / Des robots aussi résilients que des animaux, ResiBots, Jean-Baptiste Mouret, 27.03.2015
[Image] Ce robot hexapode est utilisé dans nos expériences pour évaluer nos algorithmes. Il a ici la patte avant gauche cassée. Le robot embarque une batterie, un ordinateur sous GNU/Linux, et une caméra 3D. Grâce à un algorithme d’odométrie visuelle, la caméra 3D permet au robot d’évaluer sa vitesse de déplacement et donc d'évaluer sa performance sans dispositif externe. (Antoine Cully/UPMC 2015)
Par Laetitia Theunis. Demain, la Terre. « Imiter la nature pour plus de durabilité »
[...]
« Dans le laboratoire de microrobotique du Professeur Tristan Gilet (ULg), on observe les insectes marcher au plafond. Grâce à une savante succession de détachement et d’attachement de leurs pattes sur le support, les scarabées étudiés parviennent à défier les lois de la pesanteur pour évoluer la tête en bas sans tomber. Cette particularité, lorsqu’elle sera comprise, permettra à l’électronique de faire un grand bond en avant. En effet, « la production miniaturisée de composants électroniques, comme des petites résistances ou des petits condensateurs, est limitée par la capacité de la pince des robots assembleurs qui les prend et les dépose sur le support. Lorsque la taille de ces pièces est inférieure à un dixième de millimètre, elles collent sur le bras robotisé. Or il se fait que les extrémités des pattes des scarabées sont bien plus fines que 0,1 mm : ces insectes ont donc trouvé la solution technique à notre problème de cohésion robotique. » C’est ainsi que depuis 2 ans, et avec le concours de biologistes, les ingénieurs étudient la mécanique sous-jacente aux mouvements des pattes des scarabées ainsi que les forces qui permettent leur adhésion au plafond. »
[Image] (Left) Dock beetle on a glass surface. (Right)
Hairy microstructures under each leg. via "Microsoft Word - SujetsTFE2014-2015.docx - T-Gilet.pdf"
http://www.montefiore.ulg.ac.be/~vdh/section-phys/14-15/T-Gilet.pdf
Par Stanislas Kraland. Le HuffPost. « Est-ce un insecte ou un robot ? Les deux mon général. Lancé cet été sur une plateforme de crowdfunding par une entreprise éducative, le projet RoboRoach propose de démocratiser les neurosciences... en créant son propre cafard cyborg. »
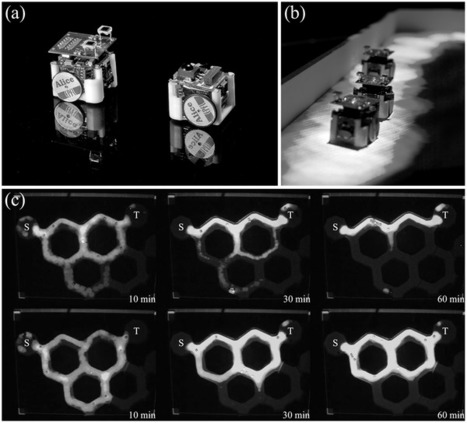
« Si l’initiative peut faire sourire, des chercheurs de la North Carolina State University (NCSU) prennent la chose au sérieux. Ils estiment dans une étude que de petits cyborgs, comme ces cafards, pourraient se révéler utiles en cas de catastrophe, grâce à leur capacité à explorer éboulis, ruines et autres décombres. »
Cartographie en direct
« L'idée? Envoyer sur le terrain une nuée de cyborgs contrôlés à distance et équipés de capteurs électroniques. "On s'est concentré sur la possibilité de cartographier les lieux où on ne pourrait suivre les cyborgs à la trace à cause de l'absence de GPS, comme un immeuble écroulé," précise dans un communiqué Edgar Lobaton, assistant-professeur d'ingénierie informatique et électrique à la NCSU. »
« Dans un premier temps, les cyborgs exploreraient la zone de manière tout à fait aléatoire. Si le lieu est confiné et qu'ils croisent des victimes, les humains en seraient prévenus en surface grâce aux ondes radio émises par les biobots. »
« Une fois la nuée de cyborgs éparpillée, les cyborgs seraient ensuite instruits de continuer d'avancer jusqu'à ce qu'ils se retrouvent face à un mur et le suivent. En alternant mouvements aléatoires et suivis de mur, les cyborgs pourraient être amenées à se croiser et donc à le signaler en surface, toujours grâce à un signal radio. »
« En surface justement, un ordinateur récupérerait les données. En les croisant grâce à un algorithme, les sauveteurs pourraient alors cartographier les décombres. "Cela donnerait aux premiers secours une idée de la topographie du lieu," explique le chercheur. »
Polémique
« Technologiquement, c'est faisable. La preuve: ces insectes cyborg existent déjà, comme en témoignent les RoboRoach. »
« Cependant, l'idée de prendre possession du corps d'êtres vivants grâce à la technologie crée d'ores et déjà la polémique. Lorsque les deux ingénieurs à l'origine de RoboRoach ont présenté leur projet à l'occasion d'une conférence TEDx à Detroit début octobre, le professeur de philosophie canadien Michael Allen Fox avait dénoncé "une manière de considérer des organismes vivants complexes comme s'il s'agissait de machines ou d'outils". »
[...]
INNOVATION – C'est l'œuvre de scientifiques français, allemands et suisses... Recréer l’œil à facettes d’une mouche. Ça, c’est fait. Des scientifiques suisses, allemands et français sont parvenus à mettre au point le premier œil de mouche artificiel capable, comme un insecte en vol, de mesurer le défilement des objets dans son champ visuel. Concrètement, cet œil baptisé CurvACE est composé de 640 petits yeux, appelés ommatidies –le même nom que pour les insectes. Chaque ommatidie est constituée d’une lentille de 172 microns et d’un pixel de 30 microns de diamètre. Et les résultats sont impressionnants: CurvACE offre un champ panoramique horizontal de 180° et vertical de 60°, pour une taille de seulement 15mm de diamètre, pour une consommation de quelques milliwatts et pour une masse de l’ordre d’une pièce de deux centimes. Cet œil artificiel est également capable de lire jusqu’à 1.000 images par seconde. [...]
L'éthologue toulousain Guy Theraulaz et son équipe viennent de transférer à des robots biomimétiques les principes de l'intelligence collective des fourmis en déplacement. Si, enfant, vous avez passé des heures à observer les allées et venues des fourmis, le phénomène ne vous a pas échappé : les bestioles vont et viennent autour de leur fourmilière sur des chemins qui finissent par se dessiner dans la poussière à la manière d'un sentier de moutons en montagne. Mais du constat à la compréhension de cet itinéraire immuable, emprunté comme un seul homme par toute la colonie, le chemin était encore long. Il vient d'être parcouru à pas de robots biomimétiques par l'équipe de Guy Theraulaz du CNRS en collaboration avec Christian Jost et Maud Combe, au Centre de Recherches sur la Cognition Animale de l'Université Toulouse III Paul Sabatier et Simon Garnier de l'Institut de Technologie du New Jersey (États-Unis). [...]
Comment les fourmis font-elles pour s'orienter et sélectionner le plus court chemin reliant deux zones dans un réseau de galeries ? C'est pour répondre à cette question que deux chercheurs toulousains, Guy Theraulaz et Christian Jost, du Centre de recherches sur la cognition animale (CNRS/Université Toulouse 3 Paul-Sabatier) ont utilisé des micro-robots biomimétiques. Leur étude, conjointe avec l'institut de technologie du New Jersey vient d'être publiée dans la revue scientifique spécialisée PLos Computational Biology.
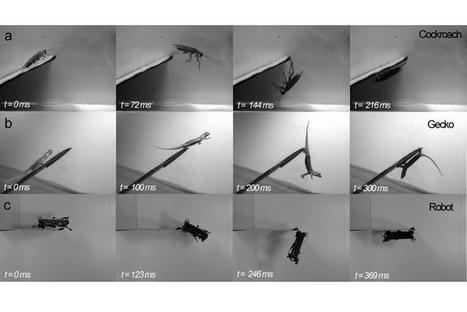
En 1 seconde, le VELOCIRoACH peut en effet parcourir 26 fois sa taille. Pour maximiser sa vitesse de déplacement, le chercheur Duncan Haldan et ses collègues ont étudié l'anatomie du cafard dont la course lui permet de se déplacer de 1,5 mètre par seconde, nous informe le New Scientist. D'où lui vient cette célérité ? Ce seraient ses pâtes en forme de C qui, comme chez le vrai cafard, fonctionne tels des ressorts alors qu'elles touchent le sol près de 15 fois par seconde. Pour rester stable dans sa course, six de ses pattes, trois de chaque côté, sont en contact avec le sol à tour de rôle.
|









![[Vidéo] Contrôler un cafard à distance grâce à Kinect | EntomoNews | Scoop.it](https://img.scoop.it/YoDx6NV5BJH8TbO0DR1NeTl72eJkfbmt4t8yenImKBVvK0kTmF0xjctABnaLJIm9)